Welcome to the Intelligent Robotics Lab at UNIST. Our research is dedicated to advancing the field of robotics through the development of intelligent control systems for a diverse range of robotic platforms. We aim to imbue robots with the ability to perceive, understand, and interact with complex and dynamic environments. By integrating principles from model-based control, machine learning, and computer vision, we tackle fundamental challenges in robot locomotion, manipulation, and interaction.
Our research is focused on three main thrusts:
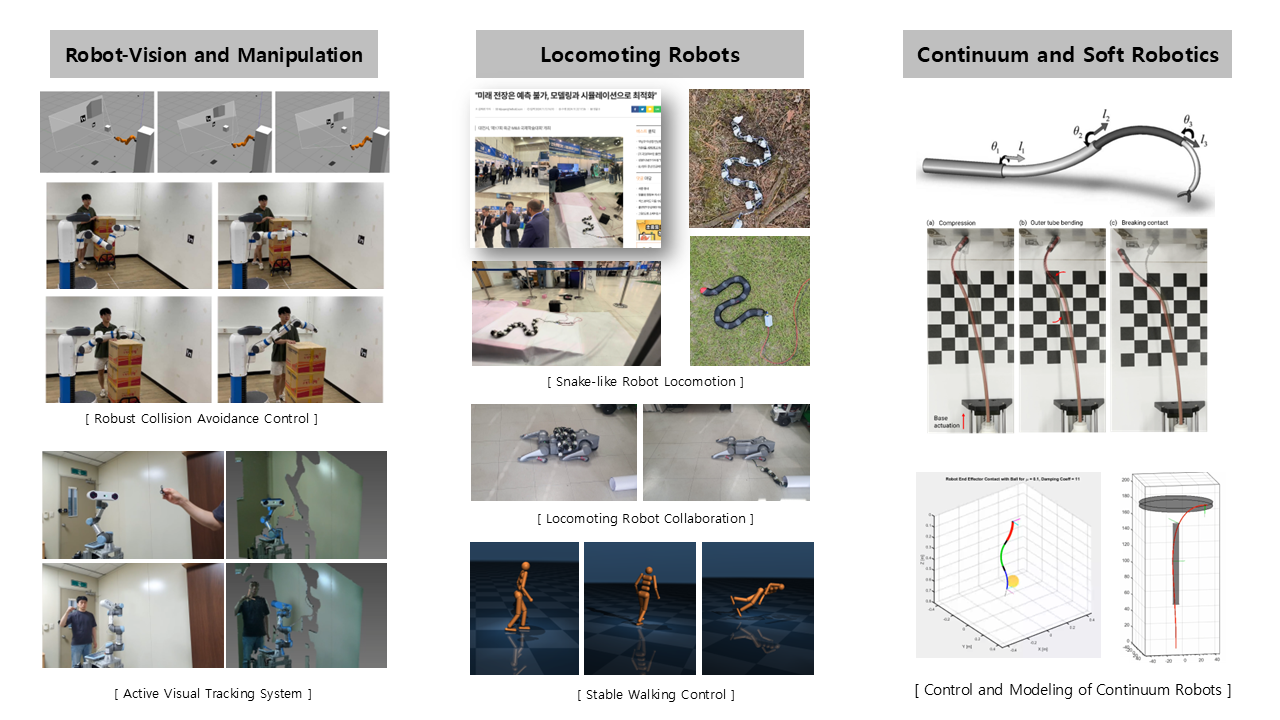
1. Robot-Vision and Manipulation
A primary goal of our research is to enable robots to intelligently manipulate objects in unstructured environments. We are developing sophisticated control strategies that leverage visual feedback to allow for robust and adaptive manipulation. Our work includes creating systems for robust collision avoidance, enabling safe and efficient operation alongside humans and in cluttered spaces. Furthermore, we are exploring active visual tracking systems that allow robots to dynamically follow and interact with objects of interest. Through the integration of deep reinforcement learning and advanced vision algorithms, we are pushing the boundaries of what robots can achieve in complex, real-world manipulation tasks.
2. Locomoting Robots
Inspired by the efficiency and adaptability of biological systems, our lab investigates novel locomotion strategies for various robotic platforms. We develop control algorithms for both legged and limbless robots to navigate challenging terrains. Our research on snake-like robots focuses on mimicking biological serpentine motion, allowing them to traverse complex and confined spaces where traditional robots cannot go. For humanoid and other legged robots, we focus on developing stable walking control to ensure dynamic and robust bipedal locomotion. Our approach combines model-based predictive control with data-driven methods like reinforcement learning to achieve highly agile and resilient movement.
3. Continuum and Soft Robotics
We are at the forefront of research in continuum and soft robotics, developing flexible robots capable of navigating and operating in constrained and delicate environments. A significant application of this research is in the medical field, where we design and control continuum robots for minimally invasive surgical procedures. Our work involves the complete pipeline from fundamental modeling of their complex kinematics and dynamics to advanced motion planning and control. This research also extends to exploration robots designed to navigate and inspect intricate or hazardous areas. By advancing the control and modeling of these compliant structures, we aim to unlock new applications in healthcare, inspection, and beyond.